That’s an amazing drone project. I am also working on a similar project, which I am planning to complete in a week’s time. Do you have any special ideas that you can share? I found some useful ideas and FPV quadcopter designs here: http://mydronelab.com/best-pick/fpv-quadcopters.html
This is my latest 15 inch ultra-long range setup with 50 minutes flight time: Propellers: 15x5.5" Tarot with custom hub Motors: T-Motor MN3110 470 kV Frame: 240g custom carbon structure Lipo: 2x 4S 4000 mAh SLS 20C (parallel) Camera: Micro Runcam micro sparrow Firmware: INAV FC: Holybro Kakute F7 ESC: Tekko32 F3 GPS: BN-180 Compass: QMC5883L Receiver: FRSky R9 slim+ Hovering flight time is 50 minutes at 8.5 Amps and 40% throttle. Current goes up to 12 A when flying 50-60 km/h. Flight characteristics are really good when tuned properly (you'll nee a HUGE D-term). Here is the CAD file of the frame. INAV 2.4.0 PID settings: set mc_p_pitch = 85 set mc_i_pitch = 60 set mc_d_pitch = 150 set mc_p_roll = 85 set mc_i_roll = 60 set mc_d_roll = 150 set mc_p_yaw = 200 set mc_i_yaw = 70 set mc_p_level = 40 set mc_i_level = 10 set max_angle_inclination_rll = 500 set max_angle_inclination_pit = 500 set dterm_lpf_hz = 30 set use_dterm_fir_filter = OFF set yaw
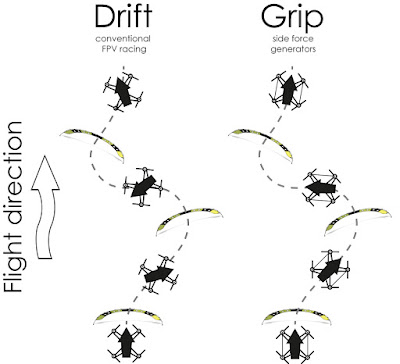
Summary: FPV racing multirotors with side force generators (SFGs), will drift less during turns, making them potentially faster on race tracks (watch the video comparison here ) . But the SFGs need the be carefully placed and dimensioned, so that aerodynamic centre and centre of mass are at the same position. Otherwise it will not work. Introduction Recently, I was thinking about how to improve the handling of racing copters. I noticed since quite a long time, that different copters behave quite differently in fast turns: Some drift quite a lot (especially when they carry a larger battery or an action cam), others drift less. I was always preferring copters that drift as little as possible. That is also why I am trying to reduce the weight of my copters as much as feasible. The amount of drift depends on the weight of the copter and the lift and drag of the fuselage for sideways air streams (side-slip). The larger the lift and drag, the more side force the fuselage produces a
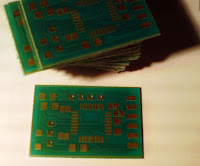
The last nights were a bit shorter for me, since the PCBs I ordered at bilex-lp.com arrived. They look really good and seem to be of high quality (I ordered a different "solder resist" colour, well, I like bright colors, but anyway... ). So I had the opportunity to do my very first SMD solderings. This really seems to be comfortable... I will completely switch to SMD I think. The I²C to PWM converters work! Here are the features: Weight under 1 g Works with (most likely many) standard ESCs (currently tested: HK SS 18-20A, ...) I²C address selectable via solder jumpers (4 standard mikrokopter addresses dec 82, 84, 86, 88) Refresh rate selectable via solder jumpers (417 Hz, 292 Hz, 155 Hz, 49 Hz) Pulse width (I²C 0-255): 990µS - 2010µS Pulse width at startup (3 s): 920µS Motor off when no I²C connection longer than 256ms Motor off when microcontroller crashes (veeeery unlikely) Powered by the BEC of the ESC, or by an external 5V source (prepared as well) Very eas
About a month ago, I was presenting an idea to make drones faster on race tracks: The so called ‘side force generators’ (SFGs) enable racing drones to drift less during turns, making them potentially faster. The placement of the ‘wings’ is very critical and mentioned in more detail in my earlier post on SFGs . Some people tested the SFGs and confirmed the enhanced flight characteristics. Other people didn’t try and didn’t believe that SFGs could help. I must agree that the concept of the SFGs is not so easy to understand. That is why I will explain it in more detail here. Let’s start with something that everyone knows (figure 1). When you are going through a fast turn with your car, then your car needs to provide two forces to stay on the track (grey line): The ‘thrust’ (green) of your car needs to equal its aerodynamic and friction drag (yellow). When the car turns, then there needs to be a constant force towards the centre of the turn, called ‘centripetal force’ (red). This
Why future racing copters really should look different. by Dr. William Thielicke aka Willa aka Shrediquette ABSTRACT In this article I try to demonstrate why FPV racing multirotors need to look different. Some small modifications to the frame would (in theory…!) result in 70 % higher top speed! All that needs to be done is to align the arms parallel to the propeller flow, and to tilt the main body of the copter by about 40 degrees. I am presenting a very simple and robust racing copter design that incorporates these ideas. Furthermore, I am calculating the aerodynamic drag of different copter concepts using basic equations. The aim of this article is to make you realize the importance of aerodynamics and to stimulate people to design more innovative racing frames. INTRODUCTION Until recently, multirotors were mainly used as a “hovering device” and the top speed of these copters did hardly matter. Now, multirotor racing has become popular and all competitors are seeking



Thanks
ReplyDeleteThat’s an amazing drone project. I am also working on a similar project, which I am planning to complete in a week’s time. Do you have any special ideas that you can share? I found some useful ideas and FPV quadcopter designs here: http://mydronelab.com/best-pick/fpv-quadcopters.html
ReplyDelete